
FS06: Sonar & Radar Survey
Sonar and Radar survey have traditionally been undertaken in mainly marine environments from large sea vessels. The technological adaption with drone platforms provides a new and innovative approach which can provide solutions to marine areas, coastal areas and inland water areas that have so far not been accessible.
Background
Sonar and Radar work in the same conventions as LiDAR. However, these techniques have traditionally been used for marine based application and aerial object tracking respectively.
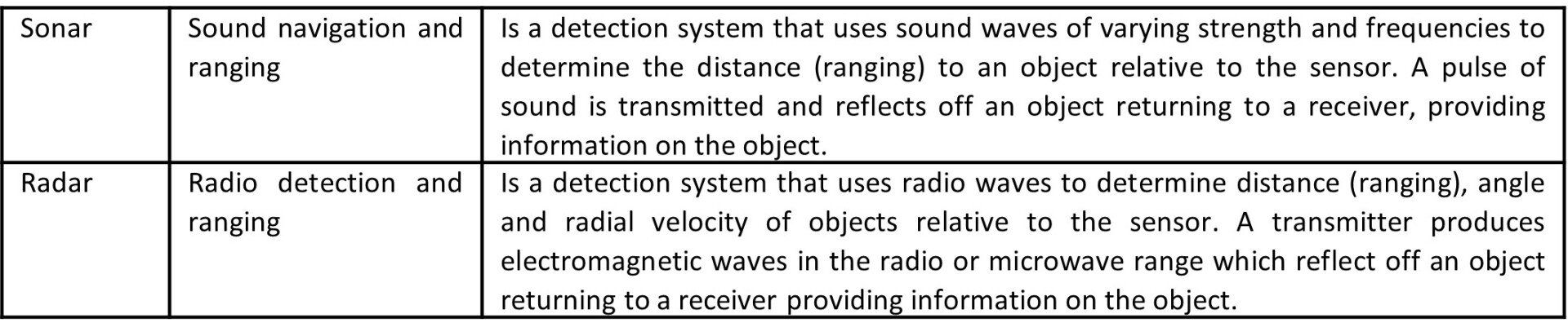
Sonar Survey
Sound travels best in water environments. Therefore, sonar is suited best to supporting mapping of marine sea beds. The most predominant form of bathymetric survey is undertaken from boats/ships with high intensity multibeam transducers pulsing sound with a range of up to 11km (with a swathe of 140 degrees) achieving accuracy c10mm (subject to depth, number of beams, swathe etc). Different frequencies of sound can be applied to provide some penetration of the sea bed mud, giving an indication of its thickness.
However, boat based sonar systems are very expensive to purchase, install and maintain with the added operating costs from managing the vessel. Boats can typically survey areas they can access but have restricted use in shallow waters such as in coastal areas, tidal zones or ports as well as inland water bodies.
New methods of increasing coverage include the use of Uncrewed Surface Vessels (USV) or drones. Surface vessels will be fitted with and use single, dual or multibeam sonar systems in a similar way to the larger crewed boats with the benefit of having a shallower draught and being capable of working in shallower waters or being easily launched and operated within inland water bodies (where there is an accessible launch area). The vessels will have lighter equipment optimised for working in shallower environments (say up to 100m). Surveys will typically use Real Time Kinetics (RTK) on the vessel paired with a ground based base station for accurate GPS positioning (XYZ).
Surveying with a drone offers a solution for surveying areas that are inaccessible or where launch is restricted by uncrewed vessels. Current weight limitations within drone platforms restrict the drone to working with single or dual beam sonar scanners. These are typically hung from the drone and dipped or dragged along the surface area of a water body. The drone will use flight aids, including RTK and radar to ensure relative height for survey work and positioning paired with a land based base station for accurate GPS positioning.
In all cases, specialist software will be used to create a point cloud of the sea bed, which in turn can be used to create a bathymetric map corrected to the marine or land coordinates to match the required use cases.
Radar Survey
Radar is typically used from ground based installations for the monitoring of positioning and movement of objects. This is because the technology is bulky. Nonetheless, radar provides a useful technology for the measurement of wave height and direction within coastal areas (which can complement the deployment of wave buoys).
However, the technology and systems are improving and simple systems, which can pulse basic frequency signals are being used in vehicles and drones etc for obstacle avoidance. Further applications within aerial drones include the pulsing signals to support flight management by allowing the drone to maintain a specific distance (e.g. when flying at a low altitude above land or water).
Nonetheless, the radar systems can also be used to provide survey mapping data or terrain and water based systems. The use of RTK can be used to accurately position a drone in three dimensions. This can be used then to support distance measurements of specific objects or demonstrate movement (e.g. such as wave height).
Watch this space for emerging survey solutions (measuring current, wave height etc). For more information on the use of higher bandwidth frequencies (ground penetrating radar etc) then check out Fact Sheet 07 Geophysics.
Survey Processes
The survey approach will always typically involve significant planning and preparation of the subject area to be surveyed. This will include an assessment of the area to ensure that it is safe to sail or fly and that all necessary permissions are in place prior to any site work.
Survey teams (typically a pilot/operator and a spotter) will base themselves in key positions to maintain Visual Line of Site (VLOS). The area of survey can be extended by moving the base or applying additional spotters for Extended Visual Line of Site (EVLOS). Larger areas where VLOS and EVLOS are not possible requires a specific safety case for approvals for Beyond Visual Line of Site (BVLOS).
Although many drones are fitted with Real Time or Post Processing Kinetics (RTK/PPK - a process to enhance positioning using global navigational satellites in real time or post flight) it is best practice to ground truth all survey based data from drones. This is achieved using RTK base station(s). This allows any fine adjustment of the surveyed datasets as well as a demonstration of the survey accuracy.
Surveying Examples
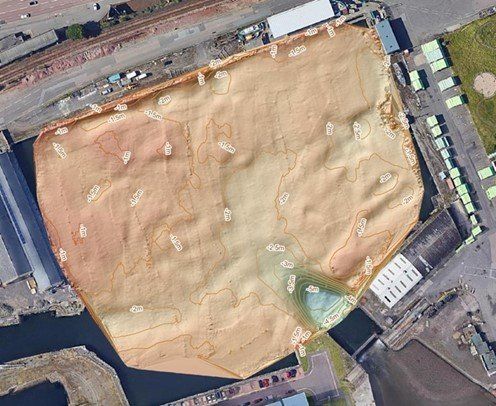
Inland Dock: Combination of USV Multibeam and Drone based single beam assessment.

Inland Waterway: Dual beam, sonar on Drone platform

Coastal Area: Multibeam survey with USV

Pre-Survey Briefing: USV Sonar (Thurn Group)

River Survey: ROV Sonar used in Speyside
What Survey Method Should I Select
In a bathymetry survey campaign, you may need to apply one or more tools to achieve your objectives. Drone solutions are designed to work with existing solutions that may be available (particularly in coastal areas).

Read Also